

The Shift Toward Automation
Across modern industries, automation is no longer a future goal—it is a present necessity. From manufacturing lines to warehouses, operations are expected to run faster, handle variability, and maintain consistency at scale.
Autonomous Mobile Robots (AMRs) are increasingly central to this shift, offering flexibility and scalability without heavy infrastructure changes.

However, before any system is deployed, organizations face a few critical questions:
- How many robots are actually required?
- Will the system meet demand consistently?
- Are we optimizing operations—or just adding complexity?
These questions define the success or failure of any automation initiative.
The Real Challenge — You Can’t Test in Production
In real-world environments, experimentation is expensive.
Deploying robots, observing performance, and iterating decisions directly on the shop floor introduces risk, downtime, and operational disruption. Every decision made in production carries cost implications.
This makes trial-and-error impractical.
Instead of testing in reality, modern automation begins in a controlled virtual environment.
Why Simulation Becomes Critical
Before a single robot is deployed, the entire operation is modeled digitally. Layouts are recreated, workflows are mapped, and robot movement is simulated.
At this stage:
- Routes that seem efficient begin to show delays
- Pickup points reveal hidden waiting times
- Parallel workflows expose bottlenecks
Simulation transforms assumptions into measurable insights.
It allows engineers to observe how the system behaves before physical deployment, reducing uncertainty and risk.
Takt Time — The Rhythm of the System
At the center of this analysis lies one critical concept: takt time.

Takt time defines the pace at which a system must operate to meet demand. It represents the rhythm of production—the rate at which outputs must be completed to stay aligned with customer requirements.
In simple terms, it answers:
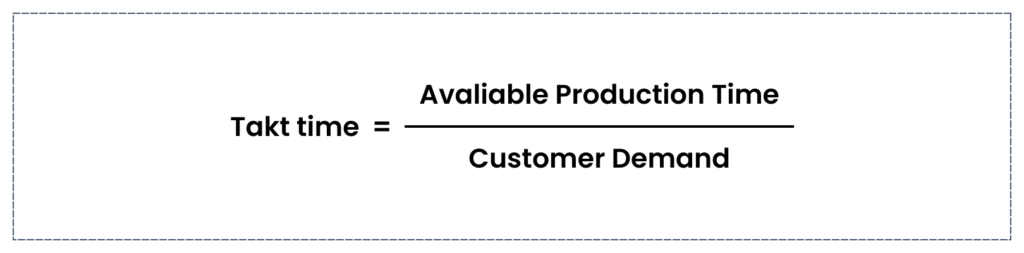
How fast should the system move to stay efficient without overproducing or falling behind?
Every movement, delay, and task in the system is measured against this benchmark.
Cycle Time — The Reality of Robot Operations
While takt time defines the required pace, cycle time defines actual performance.
An AMR does more than move from point A to B. It navigates, aligns, waits, interacts, and adapts to dynamic conditions. Each of these actions contributes to its cycle time.
In isolation, this may seem predictable, but in real-world environments, multiple robots operate within shared pathways, where tasks often overlap and compete for execution. These interactions introduce delays that ripple across the system, gradually compounding over time. As operational complexity increases, the robot’s cycle time is no longer a fixed measure but becomes dynamic, influenced by traffic conditions, task dependencies, and real-time system behavior.
Fleet Sizing — Where Most Systems Go Wrong
At this point, the core question becomes clearer:
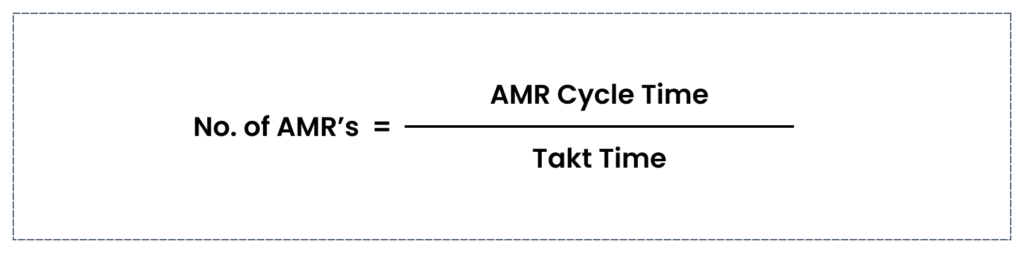
How many robots are actually needed to match the system’s takt time?
A simple calculation based on cycle time provides a baseline. However, real systems do not behave like equations.
As more robots are introduced into the system, interactions between them begin to increase. Shared paths lead to higher chances of congestion, waiting times start to grow, and task allocation becomes less efficient due to overlapping priorities. Beyond a certain point, adding more robots does not improve system performance—instead, it can reduce overall efficiency by introducing additional coordination overhead.
Simulation — Finding the Right Balance
This is where simulation becomes essential.
Within a virtual environment, engineers can explore different fleet sizes, adjust routes and workflows, analyze congestion patterns, and refine task allocation strategies without impacting real operations. Each iteration reveals how the system behaves under varying conditions, gradually moving it closer to an optimal balance.
By the time deployment begins, decisions are no longer based on assumptions, but on observed and validated system behavior.
The Core Insight — Balance Over Volume
Automation success is not defined by the number of robots deployed, but by how well the entire system is balanced. The objective is to align robot performance with the workflow rather than simply increasing fleet size.
When too many robots are introduced, the system begins to experience congestion, increased idle time, and reduced throughput as robots compete for shared paths and tasks. Instead of improving efficiency, the system becomes overloaded and less effective.
On the other hand, having too few robots creates a different set of challenges. Tasks get delayed, demand is not met consistently, and workflows begin to break down due to insufficient capacity.
The goal, therefore, is not maximization but optimization—ensuring that the number of robots is precisely matched to the system’s operational requirements.
Conclusion — Designing Scalable Automation
Simulation bridges the gap between concept and execution.
It transforms automation from a guess into a calculated system, where fleet sizing, workflow design, and operational efficiency are aligned before deployment.
In modern intralogistics, the real advantage is not deploying more robots—but deploying the right number of robots, in the right system, at the right pace.



