

Every milestone in a startup journey represents far more than a moment of recognition. Behind every achievement are countless hours of problem-solving, engineering discussions, product iterations, field validation, and the continuous effort to build technology capable of creating real industrial impact.
For our team at Goat Robotics, participating in the Maruti Suzuki Accelerator Program – Cohort 10 became one such defining milestone. What began as an opportunity to present our ideas evolved into a journey of industrial problem-solving, solution engineering, operational validation, and collaboration within one of India’s largest automotive manufacturing ecosystems.

More importantly, it reinforced a belief that has always guided our approach toward robotics: automation becomes valuable only when it solves real operational challenges at scale.
The Maruti Suzuki Accelerator Program — Innovation Built Around Industry Challenges
The Maruti Suzuki Accelerator Program is designed to identify startups building scalable and deployment-ready solutions for manufacturing, mobility, and enterprise operations. Unlike traditional innovation programs that focus primarily on concepts or prototypes, the accelerator emphasizes practical implementation within real industrial environments.
Participating startups work closely with industry experts, technical mentors, and operational teams to understand live manufacturing challenges and develop solutions capable of delivering measurable business impact. The program combines mentorship, technical evaluation, proof-of-concept opportunities, and real-world validation, ensuring that innovation remains closely aligned with operational feasibility.
For Goat Robotics, the program became an opportunity to demonstrate how Autonomous Mobile Robots (AMRs) could improve industrial material handling workflows while reducing operational inefficiencies inside high-throughput manufacturing environments.
Understanding the Manufacturing Challenge
As part of Cohort 10, our team was presented with a real-world material handling challenge involving the manual transportation of trolleys between operational areas inside the facility. Operators were responsible for moving loaded trolleys to the required destination and returning empty trolleys back into the workflow cycle.
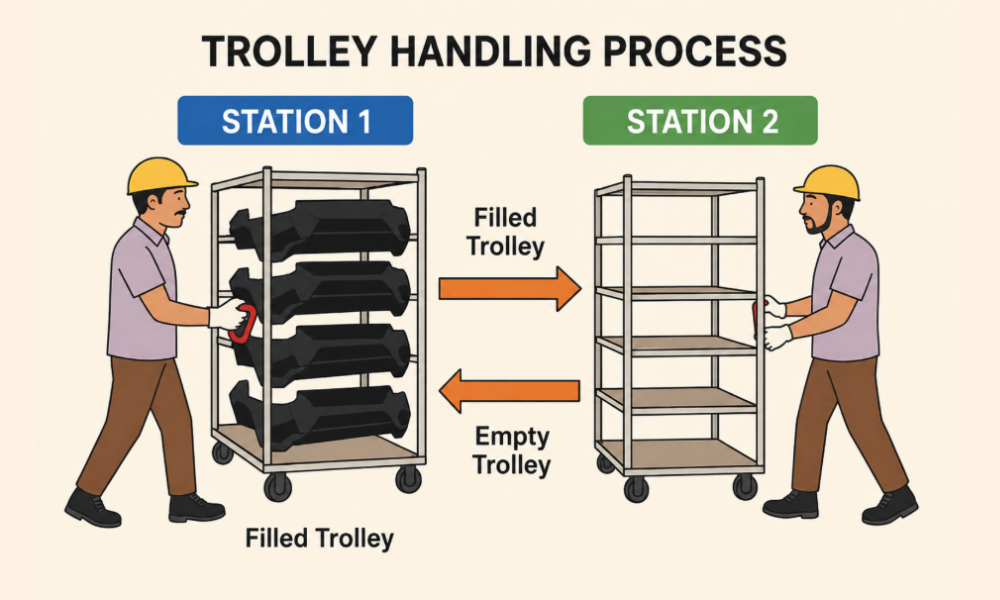
At first glance, the process appeared relatively simple. However, when analyzed at industrial scale, the workflow revealed multiple operational inefficiencies that directly impacted productivity and process continuity.
The system relied heavily on manual movement across production zones, creating increased dependency on operators for repetitive, non-value-added activities. Delays in trolley availability disrupted workflow synchronization, while movement bottlenecks affected line productivity and manpower utilization. Over time, repetitive physical transportation also introduced operator fatigue and reduced operational scalability during peak production periods.
More importantly, the process lacked real-time visibility and intelligent coordination. In high-throughput manufacturing environments, even small inefficiencies in internal material movement can compound into larger operational losses, impacting productivity, process synchronization, and overall manufacturing efficiency.
This challenge became the foundation for our engineering approach toward building an intelligent autonomous material handling solution capable of reducing manual dependency while improving operational flow across the facility.
Engineering the Right AMR Solution
Once the operational problem was clearly understood, the next challenge was selecting the right autonomous mobile robot architecture for the application. The objective was not simply to automate trolley transportation, but to develop a solution that aligned with the facility’s spatial constraints, workflow behavior, and long-term scalability requirements.
At Goat Robotics, we already had multiple AMR platforms designed for different industrial material handling applications, ranging from compact towing systems to high-capacity transport solutions. During the initial stages of evaluation, our engineering approach focused on the GTX Series AMRs, which offered a strong balance between payload capacity, navigation precision, and maneuverability. Early workflow analysis and simulation studies indicated that the GTX platform could effectively automate the trolley transportation process while significantly reducing manual intervention.
However, deeper evaluation within the actual operational environment revealed additional constraints that significantly influenced the final solution design. The workflow involved compact movement spaces and specific trolley height configurations that required a more application-specific robotic architecture. While the GTX Series performed effectively during the initial stages, the dimensional limitations of the environment required a system capable of operating more efficiently within constrained spaces without compromising safety or movement stability.
This evaluation eventually led us toward the GT-XP Series solution.

The GT-XP platform offered a more compact industrial architecture better aligned with the operational requirements of the facility. Its design allowed smoother navigation through constrained pathways while improving compatibility with the trolley dimensions involved in the workflow. By transitioning from the GTX platform to the GT-XP architecture, we moved beyond simply automating the process and developed a solution optimized specifically for real industrial deployment conditions.
This transition became one of the most important engineering decisions in the project, demonstrating how successful automation depends not only on deploying robots, but on selecting the right robotic architecture for the operational environment.
Operational Impact and ROI of AMR-Based Material Handling
Industrial automation must deliver measurable operational and business value beyond technical feasibility alone. While the proposed AMR-based solution addressed the immediate challenges associated with manual trolley transportation, it also introduced long-term improvements in workflow efficiency, manpower optimization, and operational scalability.
By introducing autonomous material movement into the workflow, the solution was expected to significantly reduce operator involvement in repetitive transportation activities, allowing personnel to focus more on value-added production operations rather than routine internal logistics tasks. Workflow continuity between operational zones could be improved while reducing delays caused by manual trolley movement and transportation bottlenecks.
The solution was also expected to improve safety by minimizing repetitive physical movement within the facility and enhance long-term scalability as production demands increased. Beyond workflow optimization, the deployment created opportunities for better coordination, improved process visibility, and more efficient utilization of shop-floor resources.
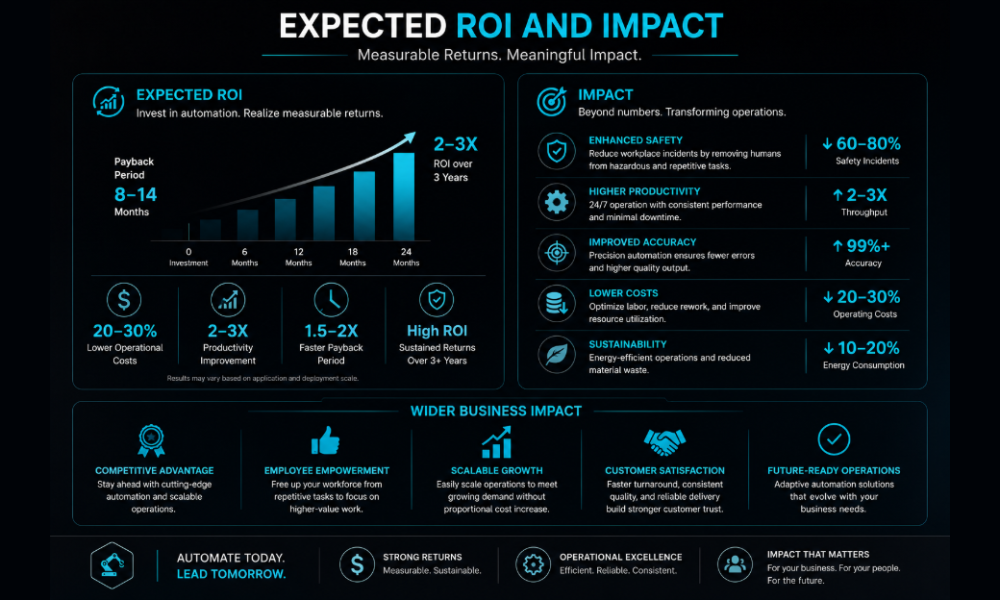
From a business perspective, the operational improvements translated into strong long-term commercial viability. Based on reductions in manual effort, productivity gains, and process efficiency improvements, the expected return on investment for the deployment was estimated to be less than three years, making the solution both technically practical and commercially scalable for industrial adoption.
From Engineering Evaluation to Industry Recognition
What began as a manufacturing problem statement gradually evolved into one of the most memorable milestones in our journey at Goat Robotics.
After multiple rounds of technical evaluation, engineering discussions, solution refinement, and presentations, our solution was shortlisted among the top-performing innovations within the Maruti Suzuki Accelerator Program – Cohort 10. Competing alongside startups from multiple advanced technology domains made the experience both challenging and inspiring.
The final demonstration phase became an opportunity to showcase not only the technical capabilities of our AMR solution, but also the practical operational value it could create within a real industrial environment. Every engineering decision—from understanding workflow constraints to optimizing the robot platform selection—played an important role in shaping the final deployment approach.
The journey reached a proud milestone when Goat Robotics was announced as the 1st Prize Winner of Cohort 10.

As part of the recognition, the Maruti Suzuki XL6 was awarded to our team, making the achievement even more memorable for everyone involved in the project.

More than the award itself, the recognition validated our belief that practical robotics solutions, when designed around real industrial challenges, can create meaningful impact at scale. The experience reinforced our commitment toward building intelligent, scalable, and industry-ready autonomous solutions for the future of manufacturing and intralogistics automation.



