Introduction
Walk into a modern warehouse or manufacturing facility today and you will likely see Autonomous Mobile Robots (AMRs) and Automated Guided Vehicles (AGVs) moving materials with remarkable precision. They transport pallets, bins, and components across the facility, navigate around workers, and deliver goods exactly where they are needed. From the outside, the process appears seamless.
Behind that choreography, however, lies an invisible layer that determines whether robots operate smoothly together or struggle to coexist. As automation expands across industries, companies are no longer deploying robots from a single manufacturer. Instead, many facilities now operate mixed fleets that combine robots with different payload capacities, navigation technologies, and operational capabilities. One vendor may specialize in heavy pallet transport, another in agile bin movement, while a third might design robots for specialized environments such as cleanrooms.
This strategy allows organizations to select the best robot for each operational task. Yet it also introduces a critical challenge: how do robots from different manufacturers communicate with a centralized control system without turning integration into a complex engineering problem?
Historically, each robot vendor implemented its own communication interface. Task definitions, status updates, and error messages were structured differently across systems. While these approaches worked well within individual ecosystems, integrating robots from multiple vendors often required custom middleware and ongoing engineering effort. Every new robot platform meant additional integration work, making large-scale automation difficult to expand.
To address this challenge, the robotics industry introduced VDA 5050, a communication standard designed to create a shared language between mobile robots and fleet management systems. By standardizing how information is exchanged, the standard enables coordination across diverse robot fleets without restricting how robots perform their internal operations.
In large-scale automation, intelligence alone is not enough. Efficiency comes from coordination, and coordination begins with a shared communication model.
Why the Industry Needed VDA 5050
Early deployments of mobile robots typically relied on a single vendor ecosystem. The robots, control software, and communication interfaces were all designed together, making integration relatively straightforward. As long as organizations stayed within the same vendor environment, the system worked reliably.
However, as supply chains grew more dynamic and production environments more complex, companies began seeking greater flexibility from automation systems. Instead of committing to a single vendor, organizations started selecting robots based on their operational strengths. Heavy payload transport, high-speed bin movement, and specialized environmental requirements often require different robot platforms.
This shift toward multi-vendor robot fleets quickly revealed a major limitation: communication incompatibility. Each manufacturer had developed its own protocol for task assignment and status reporting. Integrating multiple systems required building translation layers that allowed them to understand each other. Over time, these custom integrations became difficult to maintain and scale. Engineering teams often spend more time solving communication problems than improving operational workflows.
The lack of a common standard also created vendor lock-in. Once an organization built its automation infrastructure around a specific communication model, introducing new robot platforms became expensive and risky.
The industry needed a different approach—one that separated communication from proprietary system design. VDA 5050 was created to provide that neutral communication framework.
What VDA 5050 Is — and What It Is Not
VDA 5050 is an open communication standard that defines how a master control system and mobile robots exchange structured operational information.
It is important to understand what the standard represents. VDA 5050 is not a robot operating system, navigation algorithm, or fleet management application. Instead, it functions as a communication rulebook that defines how systems should structure and exchange messages.
The standard specifies how missions are described, how robots acknowledge tasks, how operational status is reported, and how errors are communicated. By defining these message structures, VDA 5050 ensures that robots from different manufacturers can interpret instructions in a consistent way.
A useful analogy is the language itself. Two people who speak different languages may both be highly intelligent, but communication becomes inefficient without a shared vocabulary. Robots built by different manufacturers face the same challenge. VDA 5050 provides the shared grammar that allows them to exchange information reliably.
Equally important is what the standard does not control. It does not dictate how robots navigate, how they perform obstacle avoidance, or how they implement SLAM algorithms. Those capabilities remain proprietary to robot manufacturers. By standardizing communication while leaving navigation and intelligence open to innovation, the standard balances interoperability with technological differentiation.
How VDA 5050 Communication Works
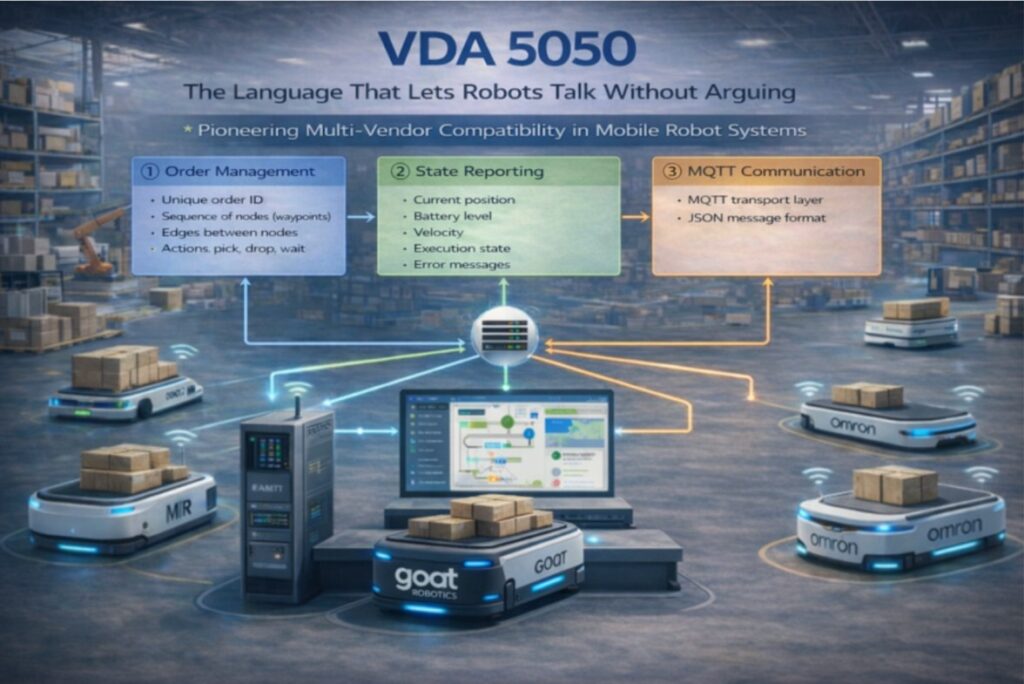
In practical deployments, VDA 5050 communication is typically built on a publish–subscribe architecture using MQTT messaging. Instead of establishing direct connections between systems, communication flows through a message broker that distributes messages to all subscribed participants.
Three components participate in this architecture: the master control system, the MQTT broker, and the robot clients operating on the floor. The master control system publishes mission instructions, while robots subscribe to those instructions and execute them. As robots move through the facility, they continuously publish state updates that the fleet management system monitors in real time.
At Goat Robotics, this orchestration layer is handled by GT Studio, our centralized fleet management platform. GT Studio assigns tasks, monitors fleet activity, and coordinates missions across robots from multiple vendors. Because communication follows the VDA 5050 schema, compliant robots can integrate through a standardized interface rather than vendor-specific communication protocols.
This architecture provides several advantages. New robots can join the system without restructuring communication flows, making the system inherently scalable. Because communication is decoupled, robots and fleet management software do not need to understand each other’s internal implementations. VDA 5050 communication uses MQTT with JSON messaging, with the standard recommending QoS 0 for most operational topics and QoS 1 for connection monitoring.
The standard defines several communication topics, including orders, state, instant Actions, connection, visualization, and factsheet messages. Together, these topics provide a complete communication interface between the master control system and the robots.
Together, these elements create a predictable communication environment in which robot fleets can grow without increasing integration complexity.
Structuring Robot Missions with Orders
Within VDA 5050, tasks are defined as structured missions known as orders. Rather than sending simple “go to location” commands, the fleet manager constructs a detailed mission description that includes movement paths and operational steps.
Each order consists of several key elements. Nodes represent checkpoints within the mission, defining positions that the robot must reach within the facility map. Edges describe how the robot moves between those nodes, including movement constraints such as speed limits. Actions represent operational steps that occur during the mission, such as picking up materials, placing loads, or interacting with external equipment.
Together, these elements transform a simple command into a structured workflow that can be tracked and monitored throughout its lifecycle. The master control system defines and coordinates the mission structure, while the robot executes the mission using its own navigation, localization, and obstacle-handling intelligence.
State Reporting — Visibility Across the Fleet
Assigning tasks is only part of fleet management. Operators also need continuous visibility into what is happening during execution. VDA 5050 addresses this requirement through standardized state reporting.
Robots publish standardized state updates about their operational status, including position, mission progress, battery level, load condition, and safety state. These updates allow fleet managers to monitor operations in real time and detect potential issues before they disrupt workflows.
In multi-vendor environments, standardized state reporting becomes especially valuable. Without a shared structure, each robot platform might report status information differently, making centralized monitoring difficult. VDA 5050 ensures that all robots communicate their status using consistent message formats, enabling unified dashboards and system analytics.
Instant Actions — Responding to Real-Time Events
Industrial environments rarely operate exactly as planned. Traffic congestion, safety events, or urgent operational changes may require immediate intervention. VDA 5050 supports this flexibility through instant action.
Unlike structured mission orders, instant actions allow fleet managers to intervene directly without rebuilding the entire mission. Commands such as pausing execution, resuming movement, or canceling a task can be delivered immediately.
This capability allows automation systems to remain responsive while still operating within a structured framework. Orders define the planned workflow, while instant actions provide the ability to react when conditions change.
Why VDA 5050 Matters for Modern Automation
Although VDA 5050 may appear to be a purely technical specification, its broader impact lies in how it reshapes automation strategy. By separating communication from proprietary robot intelligence, the standard allows organizations to deploy multi-vendor robot fleets without sacrificing operational consistency.
Fleet orchestration platforms such as GT Studio can manage heterogeneous robot systems through a unified control environment. This flexibility allows companies to choose robots based on performance, payload capacity, or operational requirements rather than communication compatibility.
Standardized communication also reduces integration risks, simplifies deployment, and makes automation infrastructure easier to maintain as fleets expand.
The Future of VDA 5050
As industrial automation evolves, robots are becoming part of larger digital ecosystems that include analytics platforms, predictive maintenance systems, and digital twins. These systems rely on structured data to operate effectively.
VDA 5050 provides the communication foundation that allows this data to flow reliably between robots and higher-level systems. Newer versions of the standard continue to expand capabilities such as map distribution, corridor navigation, and improved coordination between fleet systems and robots.
As adoption grows, the standard is gradually becoming the communication backbone of modern intralogistics automation.
Conclusion — Building Automation That Scales
Automation today is not a one-time project but an evolving system that grows alongside operational needs. A fleet supporting ten robots today may need to support fifty tomorrow, and a system designed for one vendor may need to integrate several others in the future.
VDA 5050 enables growth by introducing a shared communication layer between robots and fleet management systems, the standard removes one of the largest barriers to scalable automation: proprietary communication fragmentation. Organizations can expand their fleets, adopt new technologies, and adapt their operations without rebuilding their automation architecture.
Standards like VDA 5050 may not be visible on the warehouse floor. They do not move pallets or transport materials. Yet they provide a coordination layer that allows large fleets of robots to operate as a unified system and in modern intralogistics, that shared language makes all the difference.